On utilise ce mode pour des robots à roue folle ou robots à chenilles.
Le robot à roue folle, c'est celui qui a deux roues (une à droite, l'autre à gauche) qui peuvent tourner indépendamment l'une de l'autre (dans les deux sens) et une troisième roue dite folle, c'est-à-dire qui ne se contente que de suivre le mouvement (quel que soit le sens).
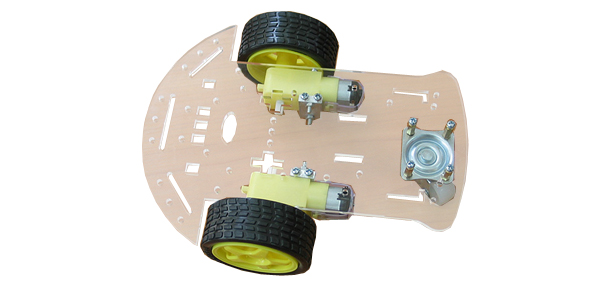
Les roues folles peuvent être faites un peu comme les roues libres des caddies de supermarché, ou avec une bille dans une sorte de rotule :

Les deux se fixent sous la plateforme et permettent à la fois de l'équilibrer et de la laisser libre de tourner.
Le robot à chenille, c'est le tank de base. Deux moteurs entraînent deux chenilles situées de part et d'autre de la plateforme :

Dans les deux cas, le principe est le même :
-
Les roues (ou chenilles) tournent dans le même sens, la plateforme avance ou recule.
-
Une roue (ou chenille) est arrêtée, l'autre continue de tourner, la plateforme tourne sur un cercle dont le centre est le point de contact de la roue arrêtée avec le sol. C'est le virage lent.
-
Une roue (ou chenille) tourne dans un sens et l'autre dans le sens contraire, la plateforme tourne sur un cercle dont le centre se situe entre les deux roues. C'est le virage rapide ou sur place.
Ce type de plateforme est beaucoup plus pratique à gérer dans les cas ou les robots doivent pouvoir tourner rapidement (voire sur eux-mêmes). Si votre montage comprend un L293D (puce qui permet de gérer deux moteurs dans les deux sens), vous pouvez sans problème vous orienter vers ce type de construction.
Voyons maintenant un principe d'articulation entre deux pièces, celui du bras mécanique.