Notions de programmation
Introduction
Tu as découvert l’IDE (Integrated Development Environment = environnement de développement) Scratch au collège pour programmer des systèmes.
Avant de se lancer dans la programmation voici une méthode à respecter.
-
Analyser le problème
-
Analyser les données d’entrée et de sortie fournies à l’utilisateur
-
Imaginer les étapes nécessaires
-
Réaliser un code
-
Le tester et valider le cahier des charges
Exemple avec le simulateur du déplacement d’un robot (cahier des charges)
On souhaite déplacer virtuellement un robot sur la trajectoire suivante.
On pensera à arrêter le robot 0.5s à chaque changement de cap.

Liste des commandes pas à pas et algorithme
Donne un algorithme du fonctionnement de ton robot sous forme de phrases qui s’enchaînent.
Conversion de l’algorithme en programme (codes)
Méthode :
-
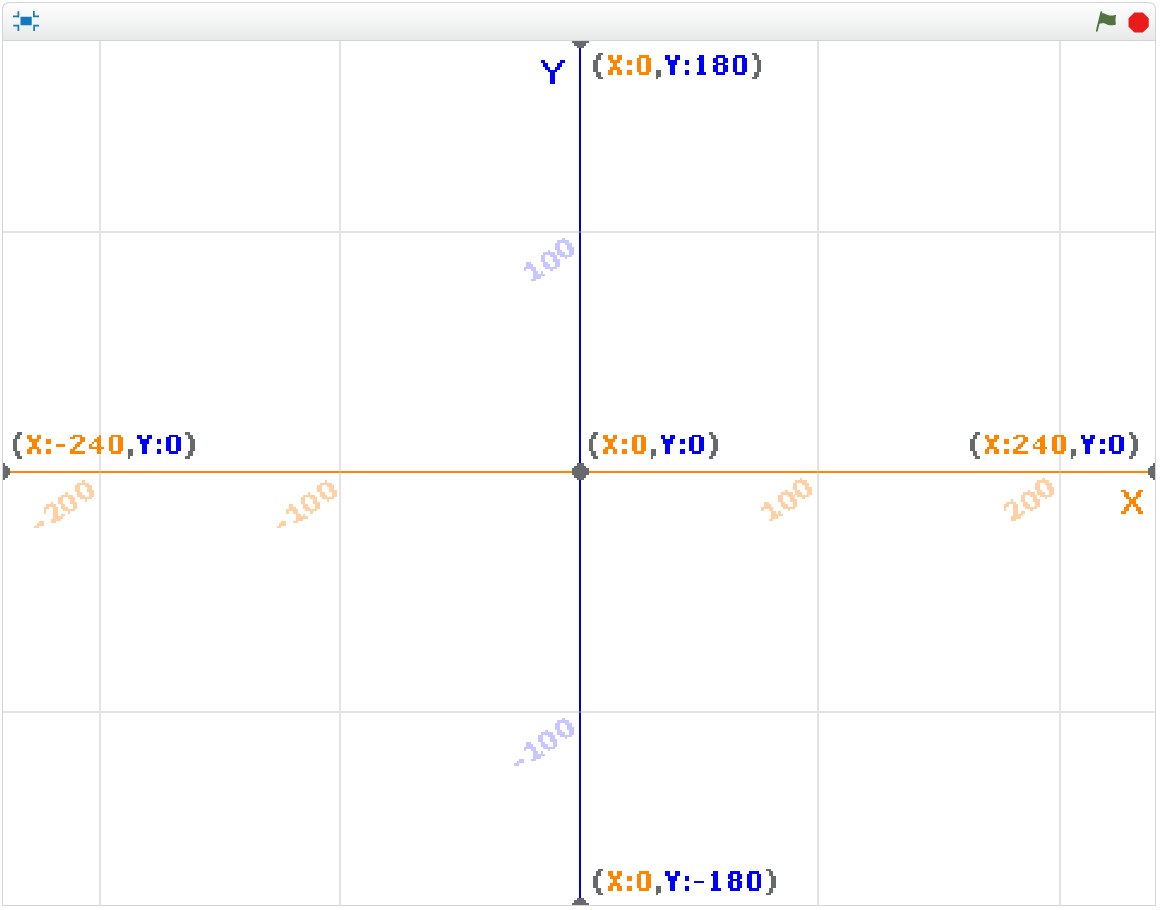
Créer les différents objets nécessaires (images) et les nommer (ici une seule image à positionner, celle du robot Mbot à trouver sur internet que vous redimensionnée à l’aide de photofiltre avec la bonne taille au format Jpeg !)
-
Positionner dans l’interface graphique les objets au bon endroit (voir point de départ et déplacements max !).
-
Associer les événements déclenchants aux différents objets.
-
A chaque événement associé un algorithme qui sera traduit en code (blocs de commande)
Le programme se déclenchera sur l’appui sur le drapeau vert.
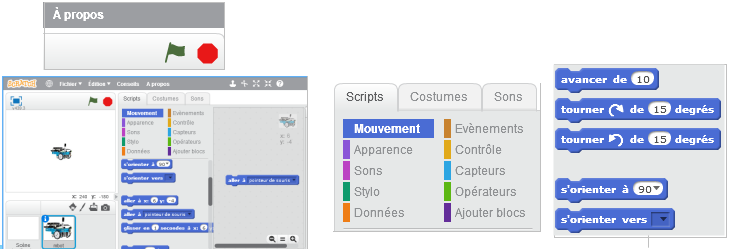
Tu utiliseras les scripts Evènements / Mouvement/ Stylo (pour tracer la trajectoire suivie par ton robot) / Contrôle (pour attendre à chaque changement de cap).
![]()
Essais du programme
Fais tes essais qui doivent correspondre au cahier des charges.
Réalisation d’un programme qui pilote un robot réel
Tu vas maintenant passer au pilotage d’un robot réel Mbot.
Il va falloir que ce robot réalise la même trajectoire imposée.
L’algorithme sera le même que précédemment, car c’est le même cahier des charges.
Utilisation des codes pour piloter le robot
Tu vas maintenant utiliser des codes pour piloter ton robot.
Pour cela tu n’utiliseras plus scratch, mais Mblock. Tu n’utiliseras plus d’événements, mais :Mblock , c’est la même interface que Scratch.
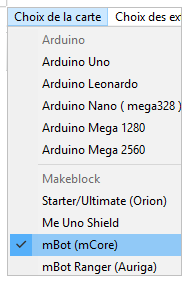
Choisi le type de robot (soit Mbot, soit Mranger) dans le menu
Tu vas utiliser la partie pilotage et les codes associés.
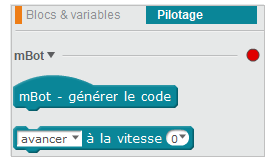
Premier programme pour faire avancer tout droit ton robot
Réalise un premier programme pour faire avancer tout droit ton robot sur 10cm environ dans un premier temps pour faire un premier essai.
N’oublie pas d’utiliser la commande attente pour gérer ta distance.
N’oublie pas d’arrêter le moteur après l’avoir démarré, sinon il fonctionnera tout le temps !
Chargement du programme dans ton robot
Utilise la documentation fournie dans le répertoire de travail pour savoir comment télécharger ton programme dans ton robot et le tester.
Pas facile de régler à 10cm la distance parcourue de ton robot. Alors passe à l’étape suivante…
Etalonnage pour obtenir une distance de parcours voulue
Tu vas mesurer la distance parcourue par ton robot sur le déplacement rectiligne donné pour voir comment lui demander d’avancer sur une distance précise en mm.
Tu as vu qu’il fallait activer les roues du robot pendant un certain temps avec une attente.
Il faudra donc connaitre l’attente à donner pour parcourir une distance d.
Tu vas faire plusieurs essais de distances.
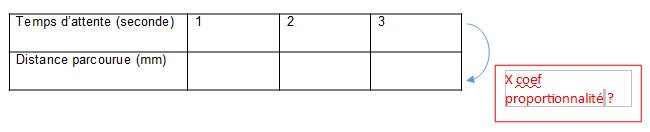
Note tes mesures dans le tableau suivant : Distance mesurée en mm
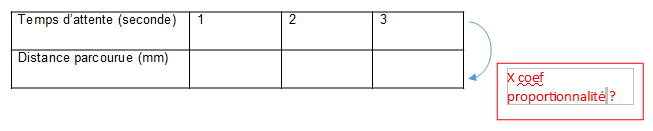
Tu pourras maintenant connaitre le temps à positionner pour que ton robot parcourt X cm quelconque.
Effectuer une rotation précise du robot
De la même manière tu vas faire des essais pour programmer la rotation précise de ton robot en effectuant les mêmes types de mesures, mais une sur une seule rotation.
Programme ton robot pour qu’il fasse qu’une seule rotation sur lui-même.
Note tes mesures dans le tableau suivant :
Tu pourras maintenant connaitre le temps à positionner pour que ton robot parcourt X cm quelconque.
Nouvelle trajectoire du robot
On souhaite lui faire suivre au robot la trajectoire suivante. Tu associeras les actions que tu as testées précédemment
10 cm
On rappelle que la somme des angles d’un polygone régulier de n côtés est de (n-2)*180 degrès.
Simulateur
Réalise dans un premier temps ton simulateur en suivant la méthode déjà vue. Teste to simulateur.
Attention, tu commences par un algorithme !
Pilotage du robot réel
Réalise la programmation de ton robot réel pour le faire fonctionner. Et teste ton système.