défi 4
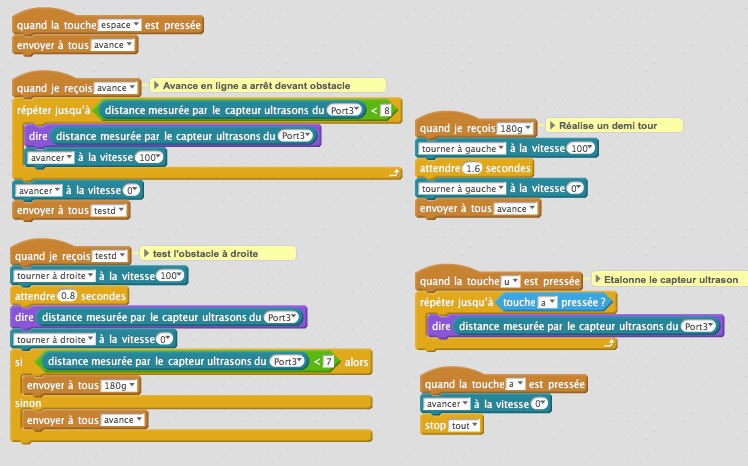
Résolution du problème en détectant les murs à l'aide du capteur ultrason, par tâtonnement.
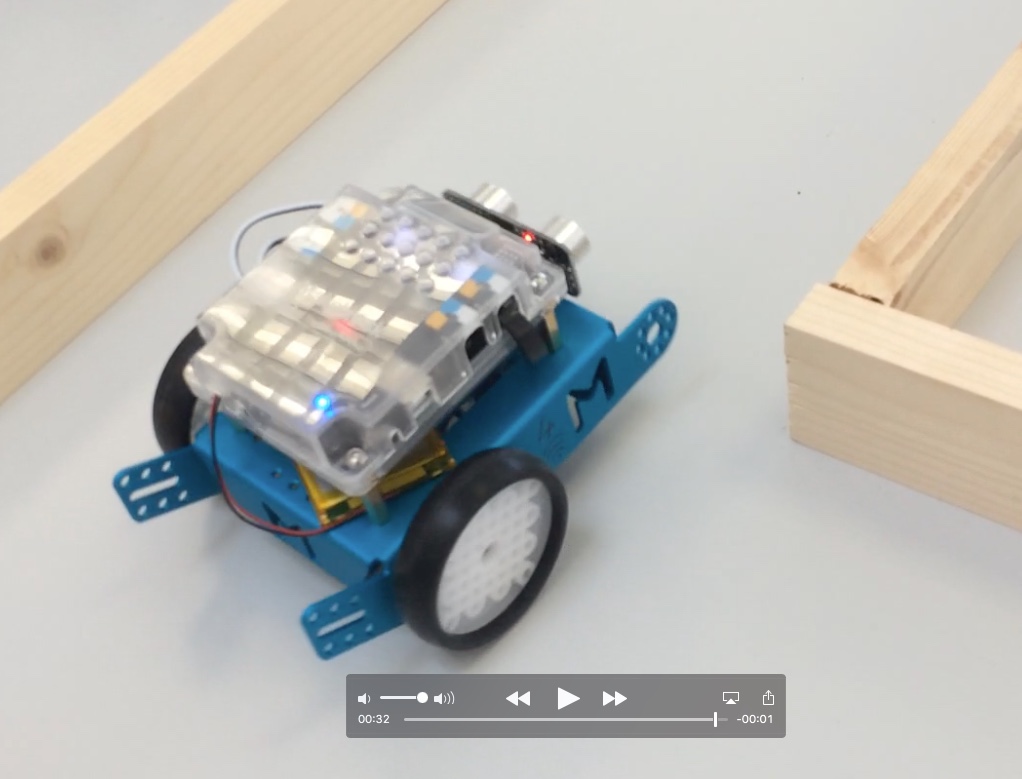
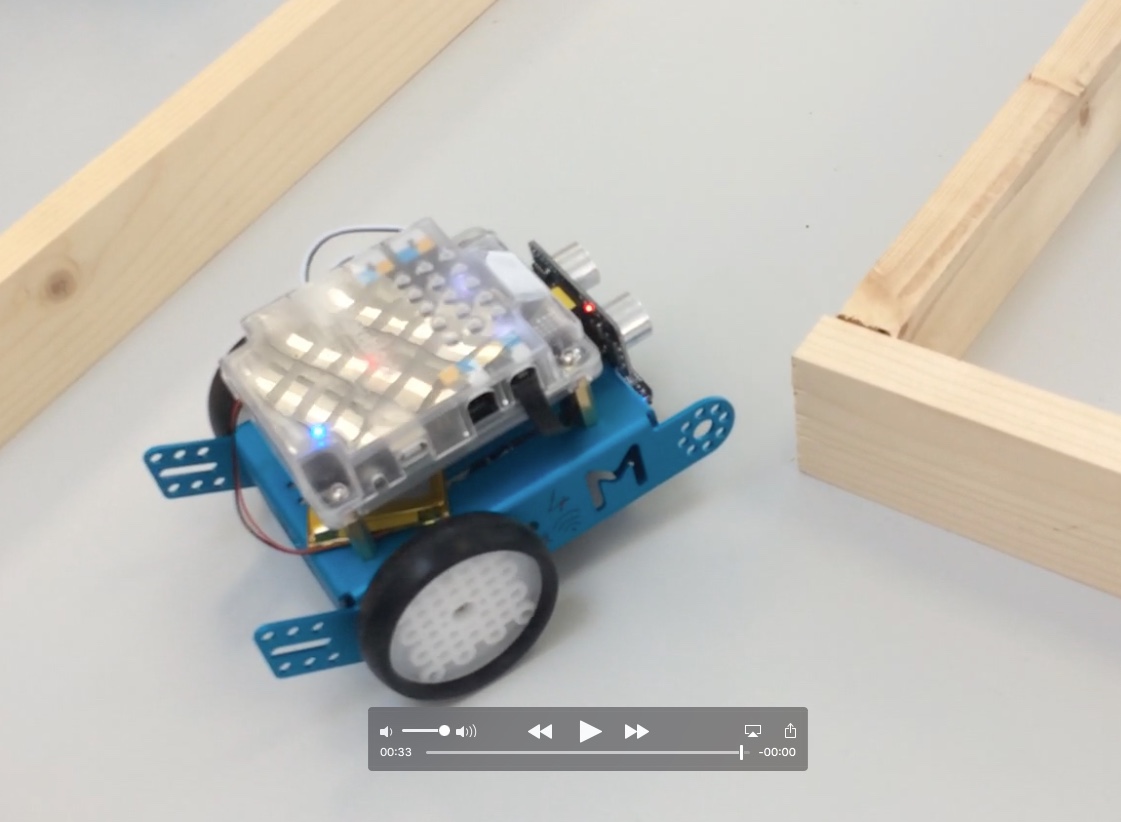
Illustration en vidéo :
mBot-Labyrinthe-4eme-ultrason-simple
|
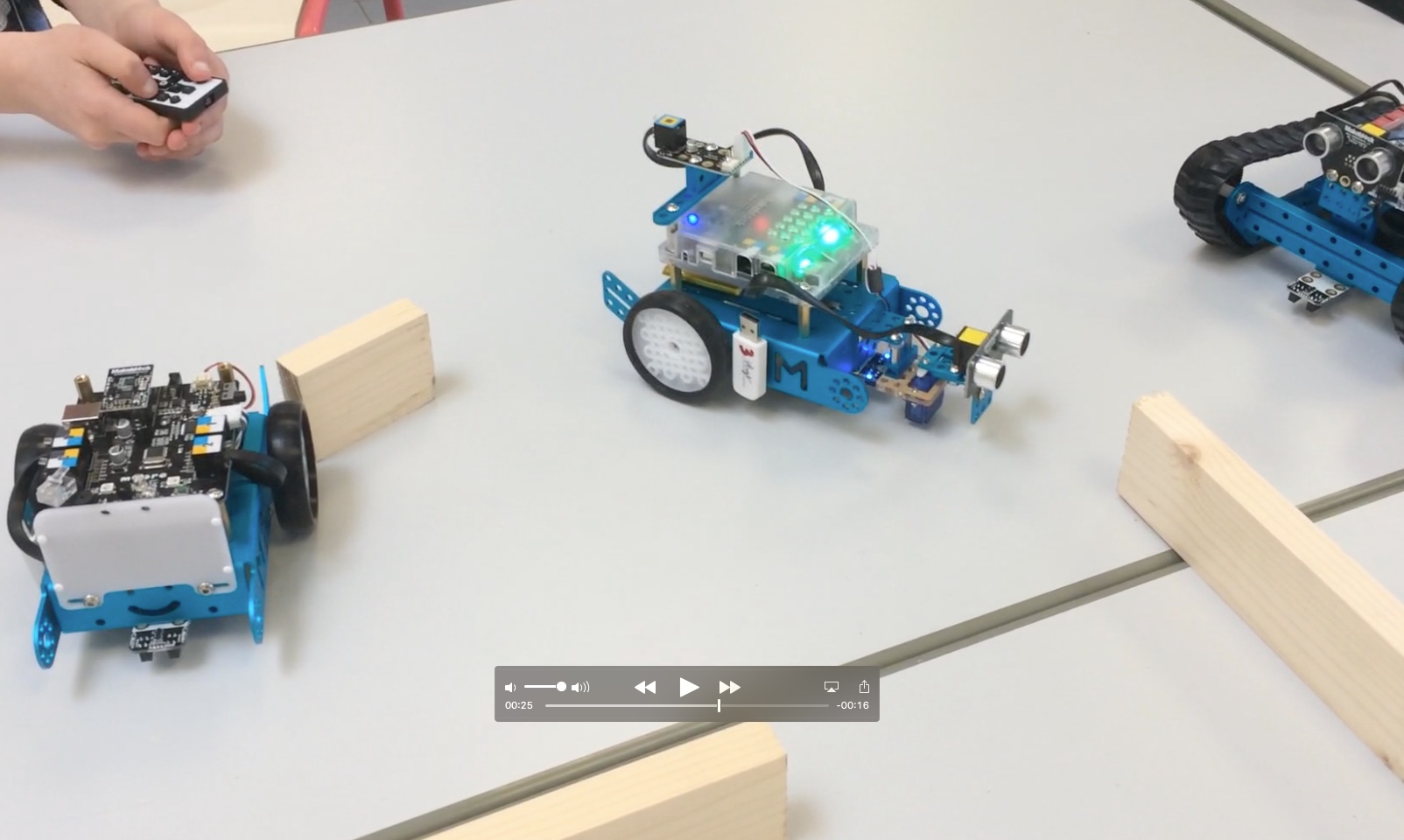
Ce script représente une des multiples façons de procéder par tâtonnement en testant les obstacles autour du robot. Il peut être amélioré ! Dans l'exemple présenté, le robot est piloté en mode wifi. Dans ce mode, les détections d'obstacles peuvent manquer de fiabilité (ralentissement lors des échanges entre l'ordinateur et le robot). Il est plutôt conseillé de téléverser le programme dans le robot.
|
- Télécharger le programme - (sb2 - 42313 B). |
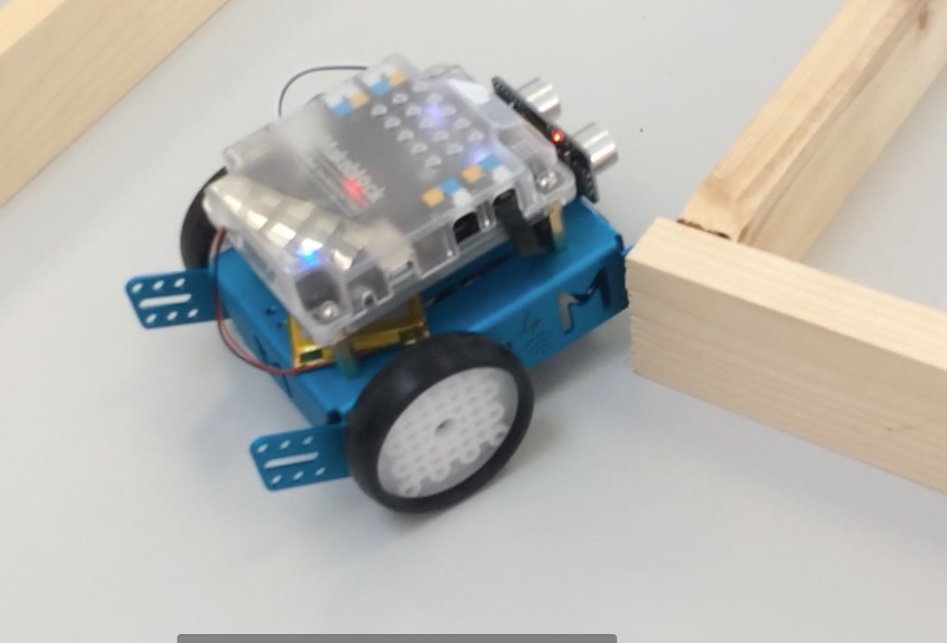
Problème : A la différence de la programmation en simulation à l'écran, Il est impossible au robot piloté en "réel" de réaliser des rotation de 90° et encore moins 180° très précises. Causes possibles :
- Incrément du temps de rotation minimale à 0.1s ou 0.2s limitant la précision.
- Alimentation électrique trop faible induisant un manque de puissance des moteurs électriques.
- Frottements / jeux dans les roues et le motoréducteur...
Le robot a donc tendance à dévier de la trajectoire idéale.
 |
 |
 |
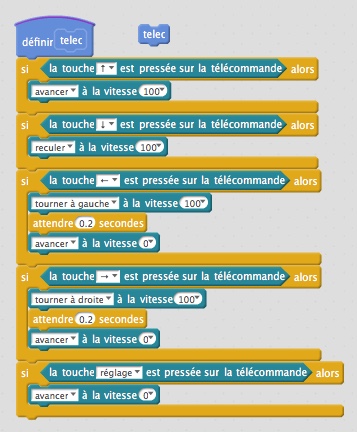
Il est possible de résoudre ce problème en programmant la télécommande infrarouge du robot pour corriger en "direct" les dérives du robot.
|
Le script pilotant la télécommande est intégré dans un sous programme. L'instruction peut être placée à tout moment dans des scripts en parallèle pour corriger la trajectoire
|
 |
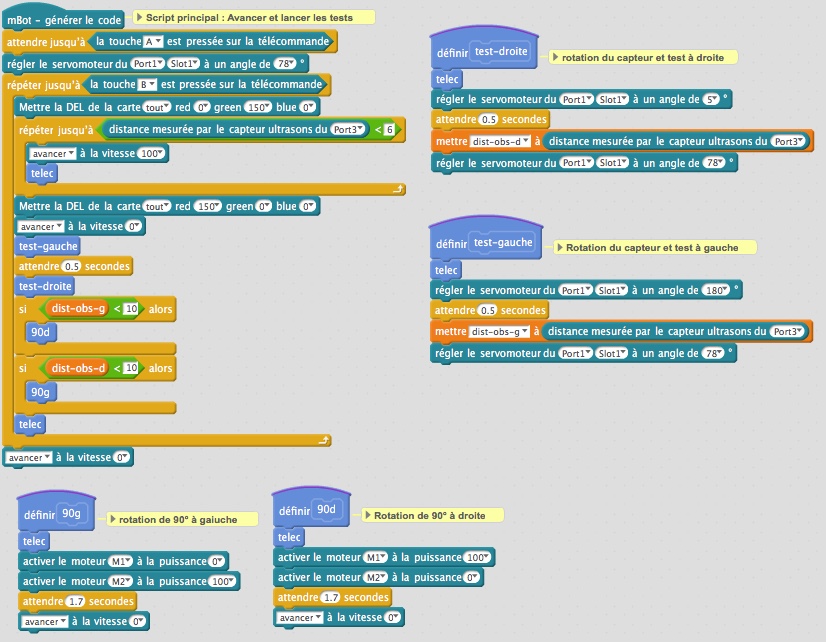
Motoriser le capteur ultrason pour limiter les déplacements du robot et gagner en précision.
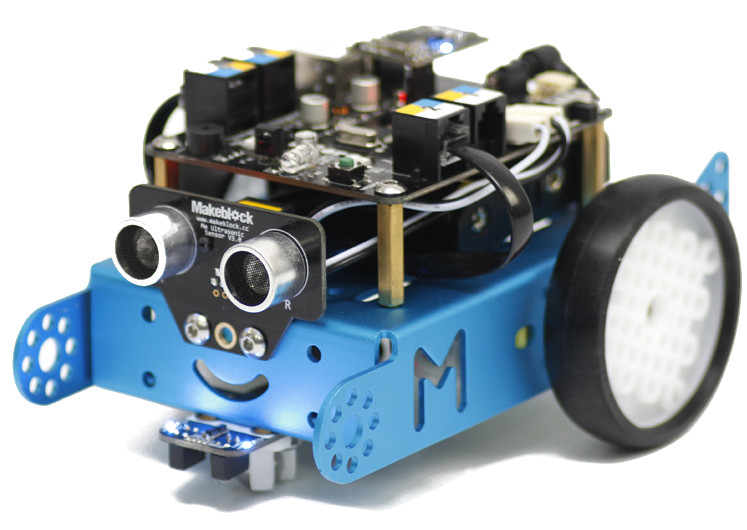
| Robot mBot de base |
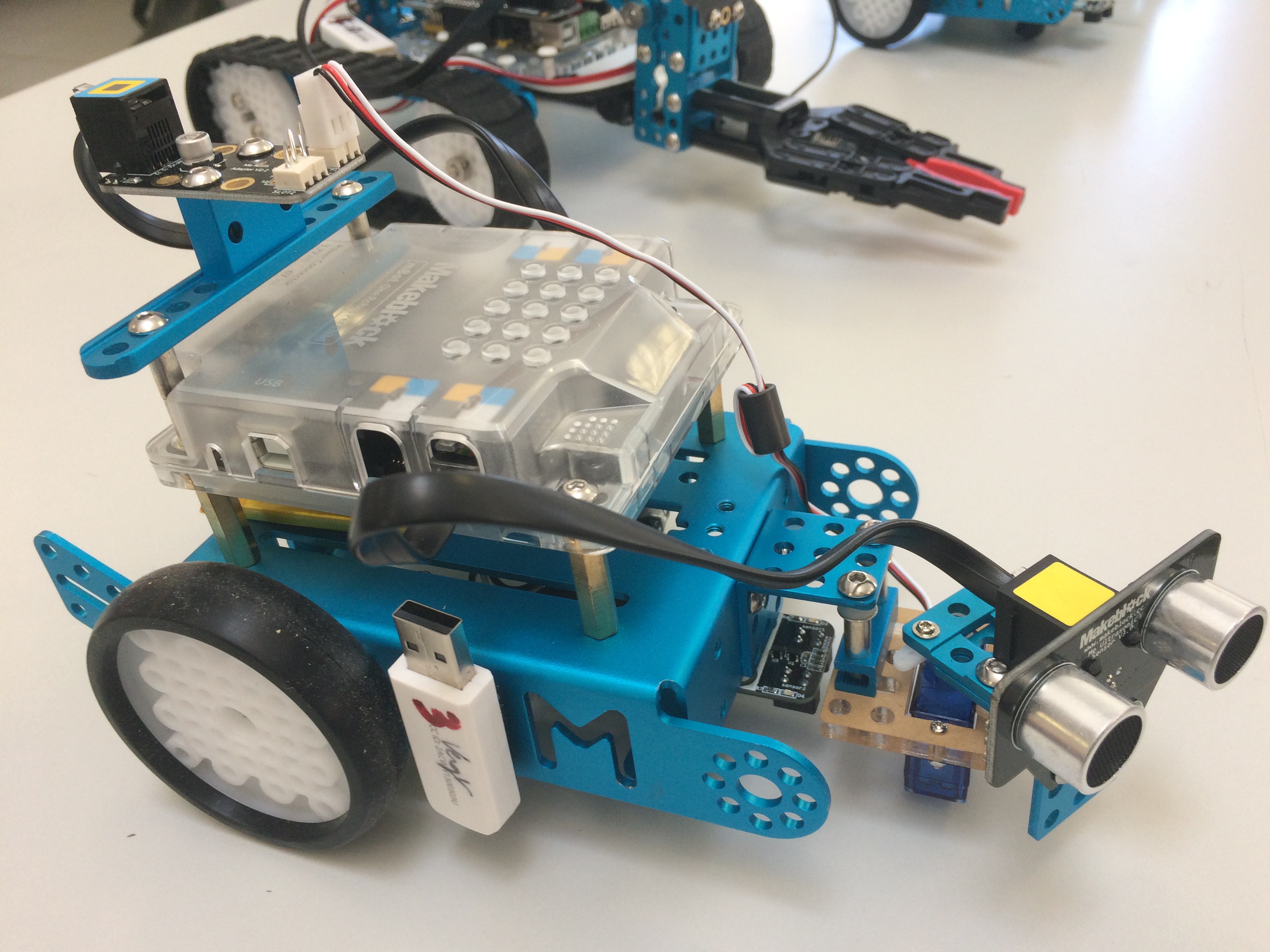
Robot mBot modifié. Le capteur ultrason est articulé autour d'un servomoteur.
|
Autre version modifiée, dont le capteur ultrason est sensiblement à sa hauteur d'origine. | |
 |
 (jpg - 1748298 B) (jpg - 1748298 B) |
 (jpg - 1432823 B). (jpg - 1432823 B). |
 |
Illustration en vidéo :
mBot-3ème-Labyrinthe-capteur-motorisé
|
Le script apporte la fonctionnalité de piloter le robot mBot à l'aide de la télécommande pour pouvoir corriger les trajectoires. (comme présenté dans la vidéo ci-dessus.) |
- Télécharger le programme - (sb2 - 278244 B). |
Remarques : 
- La modification du robot a été réalisée avec un servomoteur, ses supports et un ensemble de pièces mécaniques mises à disposition des élèves et achetées séparément. Il existe dans le commerce un Kit (- de 20€) de motorisation du capteur ultrason.
- Pour réussir à le rabaisser, d'autre pièces seront à prévoir.